The store will not work correctly when cookies are disabled.
Please be aware we use cookies to make your experience better.A cookie is a piece of data stored on a visitor's hard drive to help us improve your access and identify repeat visitors. Cookies can also enable us to track and target the interests of our users to enhance the experience on our site. Usage of a cookie is in no way linked to any personally identifiable non-public information.Learn more.
There are many applications that require movement in planar space, or movement along two perpendicular axes. This two dimensional system can be fitted with additional motors to increase the number of degrees of freedom. These types of applications can range from specimen positioning for a microscope and 3D printers to product packaging and material application.
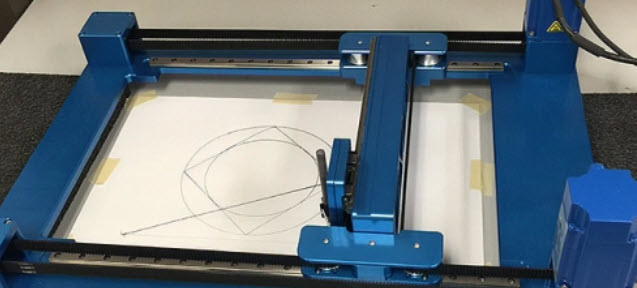
The most common way that planar motion is achieved is using a machine based on the XY stage or gantry system. This type of system can have many drawbacks which will be outlined later in this article. An alternative to these types of machines is the H-Bot which has many advantages when compared to XY stages or gantries.
This article will discuss the advantages and disadvantages of using an H-Bot for systems that use planar movement as well as Galil’s H-Bot firmware solution for the DMC-40×0.
A cookie is a piece of data stored on a visitor's hard drive to help us improve your access and identify repeat visitors. We use necessary cookies to make our site work. We'd also like to set optional cookies to help us improve it. Usage of a cookie is in no way linked to any personally identifiable non-public information. Learn More.
By clicking “Accept”, you consent to the use of ALL the cookies. However you may visit Cookie Settings to provide a controlled consent.
 There are many applications that require movement in planar space, or movement along two perpendicular axes. This two dimensional system can be fitted with additional motors to increase the number of degrees of freedom. These types of applications can range from specimen positioning for a microscope and 3D printers to product packaging and material application.
There are many applications that require movement in planar space, or movement along two perpendicular axes. This two dimensional system can be fitted with additional motors to increase the number of degrees of freedom. These types of applications can range from specimen positioning for a microscope and 3D printers to product packaging and material application.